

IMPROVE 2023
Khleef Almutairi, Samuel Morillas, and Pedro Latorre-Carmona. Fuzzy inference system in a local eigenvector based colour image smoothing framework.
Khleef Almutairi, a Ph.D. student in VIPLab under the supervision of doctoral advisor Professor Samuel Morillas, has presented «Fuzzy inference system in a local eigenvector based colour image smoothing framework» at the IMPROVE 2023 congress, held from April 21 to 23 in Prague.
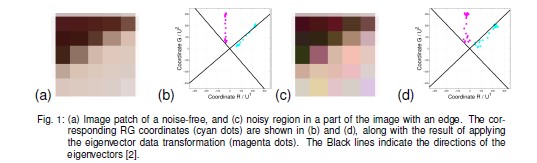
At the conference, he presented a method that uses a fuzzy inference system (FIS) for colour image denoising. It is based on a previous transform from the RGB to an eigenvector-based space.
As you know, research in digital image processing and computer vision has remarkably increased in the last decade. In particular, image filtering has been a very active topic because image Gaussian noise filtering methods are used to:
- Maximizing the smoothing of homogeneous regions
- Gently smoothing of the edges and the details of the image
- Preserving the details and structure of the image
- Avoiding the introduction of colour artifacts in the processed image

Conclusions
- This study uses a FIS framework, on top of an eigenvector-based image denoising strategy to filter Gaussian noise in colour images.
- The system infers the amount of noise that should be smoothed on a pixel-bypixel basis. It performs competitively in terms of both noise reduction, as well as image structure and details preservation.
- The proposed method is better than the EIG filter in larger images with more homogeneous areas. However, CWF has the best results for high-spatial frequency content areas and images.
- This filtering method could be improved by training the system from data extracted from the images themselves.
- Analysis of parameter tuning valid for all levels of noise, simultaneously, is in order.
IMPOVE
IMPROVE is a comprehensive conference of academic and technical nature, focused on image processing and computer vision practical applications. It brings together researchers, engineers and practitioners working either in fundamental areas of image processing, developing new methods and techniques, including innovative machine learning approaches, as well as multimedia communications technology and applications of image processing and artificial vision in diverse areas.
